二叉树的遍历
二叉树的先序、中序和后序属于深度优先遍历DFS,层次遍历属于广度优先遍历BFS。
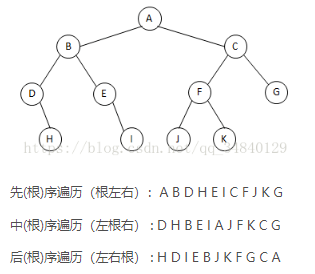
前序遍历
1 | class Solution { |
中序遍历
1 | public List<Integer> inorderTraversal(TreeNode root) { |
后序遍历
使用 null 作为标志位,访问到 null 说明此次递归调用结束。
1 | class Solution { |
层序遍历
1 | class Solution { |
排序算法
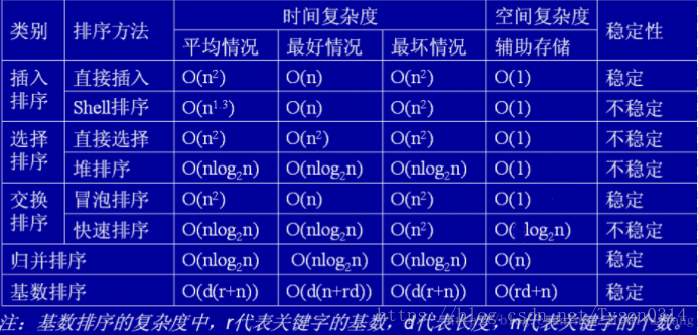
常见的排序算法主要有:冒泡排序、插入排序、选择排序、快速排序、归并排序、堆排序、基数排序。各种排序算法的时间空间复杂度、稳定性见下图。
冒泡排序
1 | public void bubbleSort(int[] arr) { |
插入排序
1 | public void insertSort(int[] arr) { |
选择排序
1 | public void selectionSort(int[] arr) { |
基数排序
在基数排序中,因为没有比较操作,所以在时间复杂上,最好的情况与最坏的情况在时间上是一致的,均为 O(d * (n + r))。d 为位数,r 为基数,n 为原数组个数。
快速排序
快速排序是由冒泡排序改进而得到的,是一种排序执行效率很高的排序算法,它利用分治法来对待排序序列进行分治排序,它的思想主要是通过一趟排序将待排记录分隔成独立的两部分,其中的一部分比关键字小,后面一部分比关键字大,然后再对这前后的两部分分别采用这种方式进行排序,通过递归的运算最终达到整个序列有序。
快速排序的过程如下:
- 在待排序的N个记录中任取一个元素(通常取第一个记录)作为基准,称为基准记录;
- 定义两个索引 left 和 right 分别表示首索引和尾索引,key 表示基准值;
- 首先,尾索引向前扫描,直到找到比基准值小的记录,并替换首索引对应的值;
- 然后,首索引向后扫描,直到找到比基准值大于的记录,并替换尾索引对应的值;
- 若在扫描过程中首索引等于尾索引(left = right),则一趟排序结束;将基准值(key)替换首索引所对应的值;
- 再进行下一趟排序时,待排序列被分成两个区:[0,left-1]和[righ+1,end]
- 对每一个分区重复以上步骤,直到所有分区中的记录都有序,排序完成
快排为什么比冒泡效率高?
快速排序之所以比较快,是因为相比冒泡排序,每次的交换都是跳跃式的,每次设置一个基准值,将小于基准值的都交换到左边,大于基准值的都交换到右边,这样不会像冒泡一样每次都只交换相邻的两个数,因此比较和交换的此数都变少了,速度自然更高。
快速排序的平均时间复杂度是O(nlgn),最坏时间复杂度是O(n^2)。
1 | public void quickSort(int[] arr) { |
归并排序
归并排序 (merge sort) 是一类与插入排序、交换排序、选择排序不同的另一种排序方法。归并的含义是将两个或两个以上的有序表合并成一个新的有序表。归并排序有多路归并排序、两路归并排序 , 可用于内排序,也可以用于外排序。
两路归并排序算法思路是递归处理。每个递归过程涉及三个步骤
- 分解: 把待排序的 n 个元素的序列分解成两个子序列, 每个子序列包括 n/2 个元素
- 治理: 对每个子序列分别调用归并排序MergeSort, 进行递归操作
- 合并: 合并两个排好序的子序列,生成排序结果
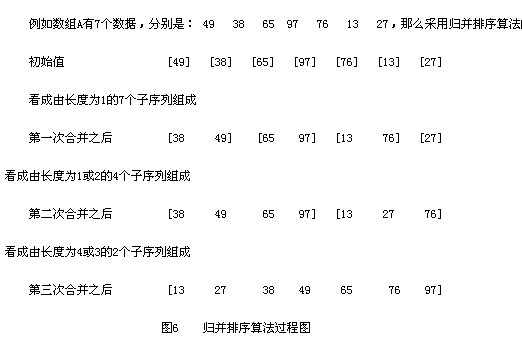
时间复杂度:对长度为n的序列,需进行logn次二路归并,每次归并的时间为O(n),故时间复杂度是O(nlgn)。
空间复杂度:归并排序需要辅助空间来暂存两个有序子序列归并的结果,故其辅助空间复杂度为O(n)
1 | public class MergeSort { |
堆排序
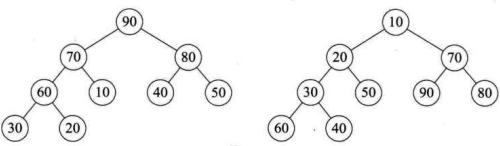
堆是具有下列性质的完全二叉树:每个结点的值都大于或等于其左右孩子结点的值,称为大顶堆;或者每个结点的值都小于或等于其左右孩子结点的值,称为小顶堆。
Top大问题解决思路:使用一个固定大小的最小堆,当堆满后,每次添加数据的时候与堆顶元素比较,若小于堆顶元素,则舍弃,若大于堆顶元素,则删除堆顶元素,添加新增元素,对堆进行重新排序。
对于n个数,取Top m个数,时间复杂度为O(nlogm),这样在n较大情况下,是优于nlogn(其他排序算法)的时间复杂度的。
PriorityQueue 是一种基于优先级堆的优先级队列。每次从队列中取出的是具有最高优先权的元素。如果不提供Comparator的话,优先队列中元素默认按自然顺序排列,也就是数字默认是小的在队列头。优先级队列用数组实现,但是数组大小可以动态增加,容量无限。
1 | //找出前k个最大数,采用小顶堆实现 |

